Implementation of controlled stabilizer system in the suspension of cross-country trucks
Implementation of controlled stabilizer system in the suspension of cross-country trucks
Abstract
The article examines the problem of improving the suspension of cross-country trucks, namely, reducing the transverse rolls of the vehicle and improving the safety of driving at high speeds. As a solution, it is proposed to introduce a system of controlled transverse stability stabilizers, which will improve vehicle controllability at high speeds without deterioration of off-road characteristics. The work describes the general device, considers the principle of operation of the system in all modes. The type and configuration of the chassis of a lorry suitable for the introduction of the proposed system into its suspension are outlined. Both advantages of active stabilizers in comparison with passive stabilizers and difficulties in implementation of the system on specific vehicles are listed.
1. Введение
Грузовые автомобили повышенной проходимости широко распространены во многих сферах экономики. Высокая проходимость позволяет им доставлять оборудование и грузы по труднодоступной местности в тяжелых климатических условиях. Однако ввиду конструктивных особенностей подвески и колёс показатели устойчивости и управляемости не позволяют безопасно двигаться на высоких скоростях. Сеть качественных асфальтированных дорог постоянно расширяется и грузовые автомобили повышенной проходимости всё чаще передвигаются не только по пересечённой местности, но и по асфальтированным дорогам, развивая при этом высокие скорости. В определенных условиях пересечённая местность занимает небольшой участок от всего пути. Поэтому проблема совершенствования подвески автомобилей повышенной проходимости актуальна.
2. Основная часть
На рисунке 1 изображена передняя подвеска автомобиля Урал. Она обладает большим ходом, что обеспечивает высокую проходимость. Но у такой конструкции есть и недостаток – большие поперечные крены при движении по дорогам с высокими скоростями, особенно при полной полезной загрузке. Для борьбы с кренами на многих дорожных автомобилях применяются стабилизаторы поперечной устойчивости. Грузовые автомобили повышенной проходимости обладают большой полной массой и высоким центром тяжести, поэтому устанавливаемый на них стабилизатор должен обладать высокой жесткостью, что сократит ход подвесок и сильно снизит проходимость.
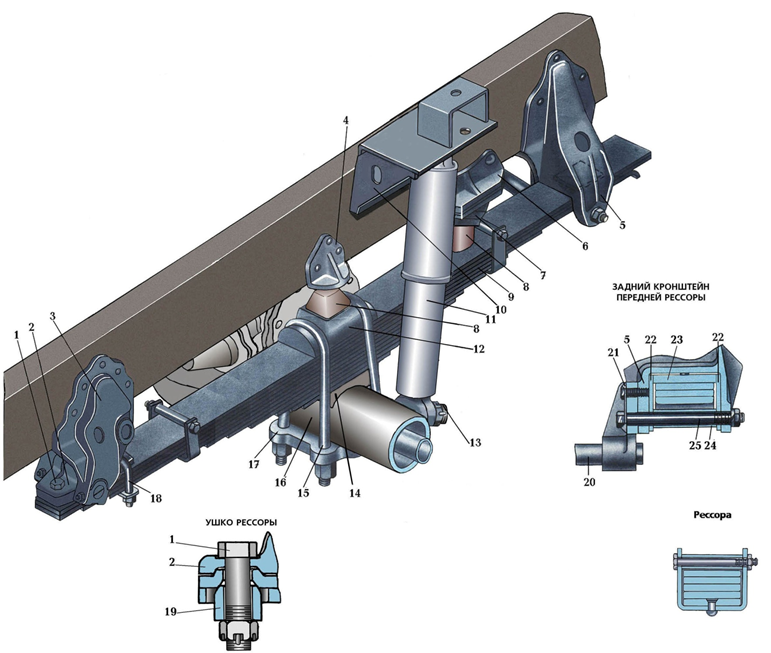
Рисунок 1 - Передняя подвеска автомобиля Урал:
1 - болт ушка передней рессоры; 2 - ушко передней рессоры; 3 - левый передний кронштейн; 4 - кронштейн буфера; 5 - задний кронштейн передней рессоры; 6 - кронштейн дополнительного буфера; 7 - обойма дополнительного буфера; 8 - буфер; 9 - передняя рессора; 10 - верхний кронштейн амортизатора; 11 - гидравлический амортизатор; 12 - накладка передней рессоры; 13 - нижний кронштейн амортизатора; 14 - подушка передней рессоры; 15 - стремянка рессоры; 16 - передний мост; 17 - хомут крепления; 18 - стремянка ушка рессоры; 19 - втулка; 20 - стяжка задних кронштейнов; 21 - пластина; 22 - вкладыши; 23 - верхний вкладыш; 24 - распорная втулка; 25 - болт; 26 - корпус клапана

Рисунок 2 - Ход задней подвески Mercedes-Benz Zetros
1) стабилизатор работает (Движение по ровной дороге);
2) стабилизатор выключен (Движение по пересечённой местности).
2.1. Общее устройство системы
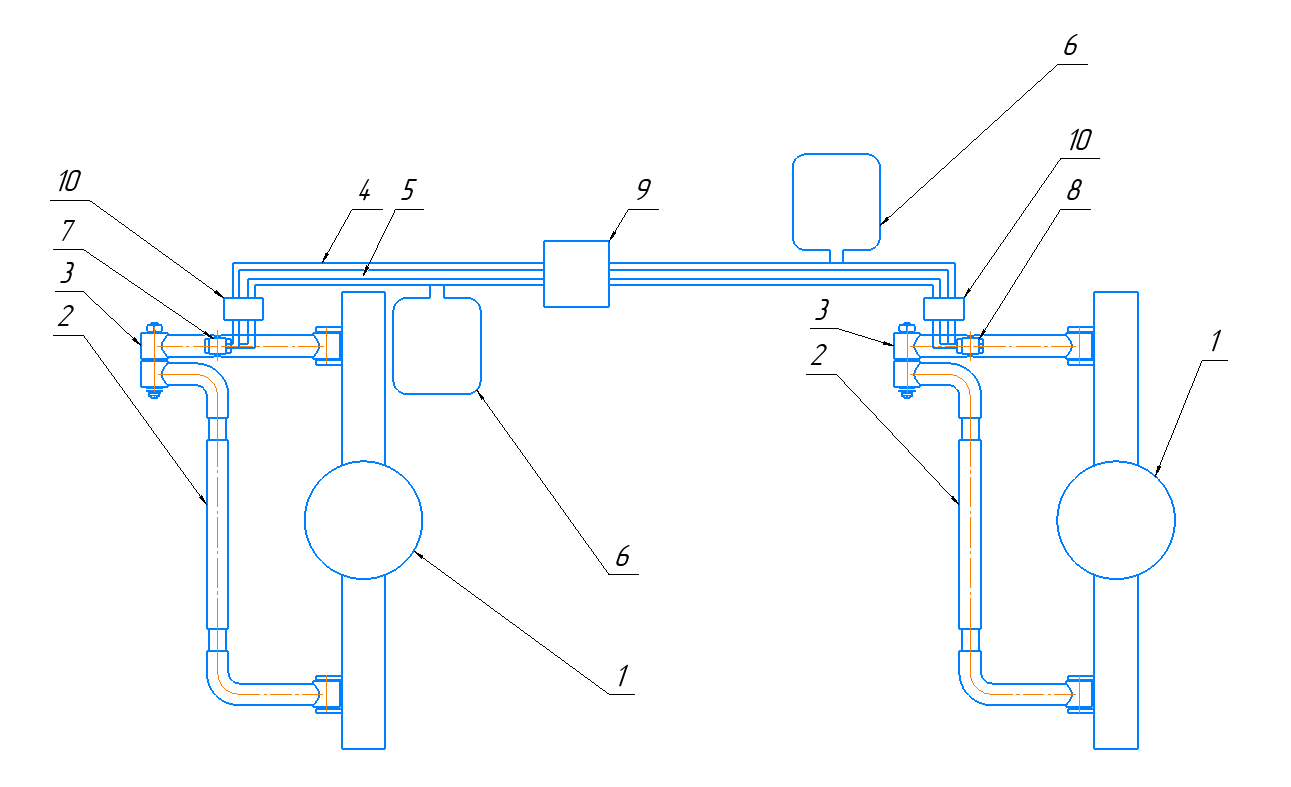
Рисунок 3 - Устройство системы:
1 - передний и задний мосты; 2 - передний и задний стабилизаторы; 3 - тяги стабилизаторов; 4 - трубопровод верхних полостей цилиндров; 5 - трубопровод нижних полостей цилиндров; 6 - гидроаккумуляторы; 7 - передний гидроцилиндр; 8 - задний гидроцилиндр; 9 - клапанное устройство; 10 - аварийные клапаны
2.2. Принцип работы системы
В конструкции применяется стабилизатор поперечной устойчивости торсионного типа. Скручиваясь, он создает момент сопротивления крену грузового автомобиля. Для обеспечения выключения стабилизатора при определенных режимах движения, он выполняется из двух частей – стабилизатора 2 (рис. 3), который через две стойки 1 (рис. 4) соединяется с рамой и правым кронштейном моста, и подвижной тяги 3, которая соединяется с рамой через гидравлический цилиндр может перемещаться относительно стабилизатора 2. Подвижная тяга 3 также крепится к левому кронштейну моста.
В нормальном состоянии цилиндр зафиксируется в таком положении, что его длина соответствует длине стоек. Тяга 3 будет блокирована со стабилизатором 2 и начнет передавать на него скручивающий момент при возникновении крена.
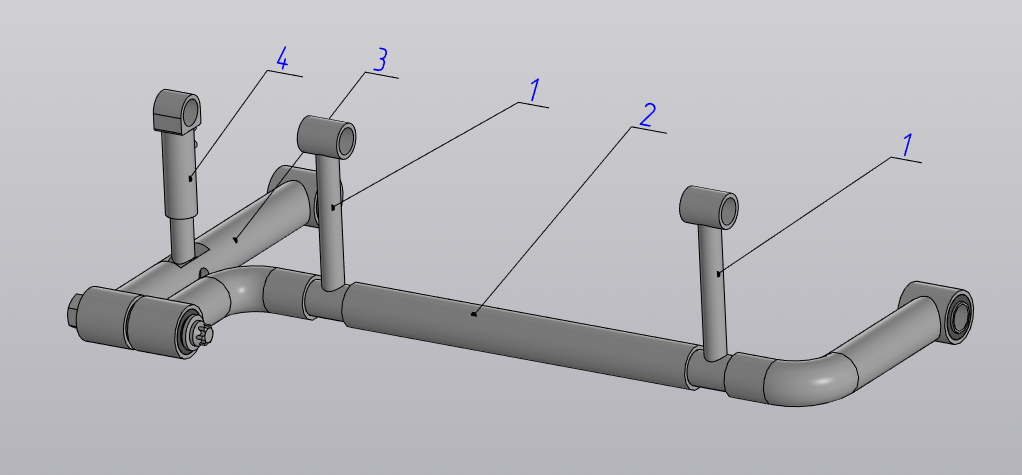
Рисунок 4 - Общий вид стабилизатора с гидроцилиндром:
1 - стойки крепления к раме; 2 - стабилизатор; 3 - подвижная тяга стабилизатора; 4 - гидроцилиндр
1. При движении по ровной поверхности. Гидравлические цилиндры находятся в блокированном состоянии, так как верхние и нижние полости цилиндров передней и задней оси соединены попарно. При такой конструкции возможно только взаимное перемещение обоих цилиндров в противофазе, то есть когда передний цилиндр движется вверх, задний будет двигаться вниз и наоборот. Когда автомобиль движется по ровной поверхности такое перемещение цилиндров невозможно, и система будет находиться в заблокированном состоянии. Цилиндры же будут выполнять роль третьей неподвижной опоры для стабилизаторов.
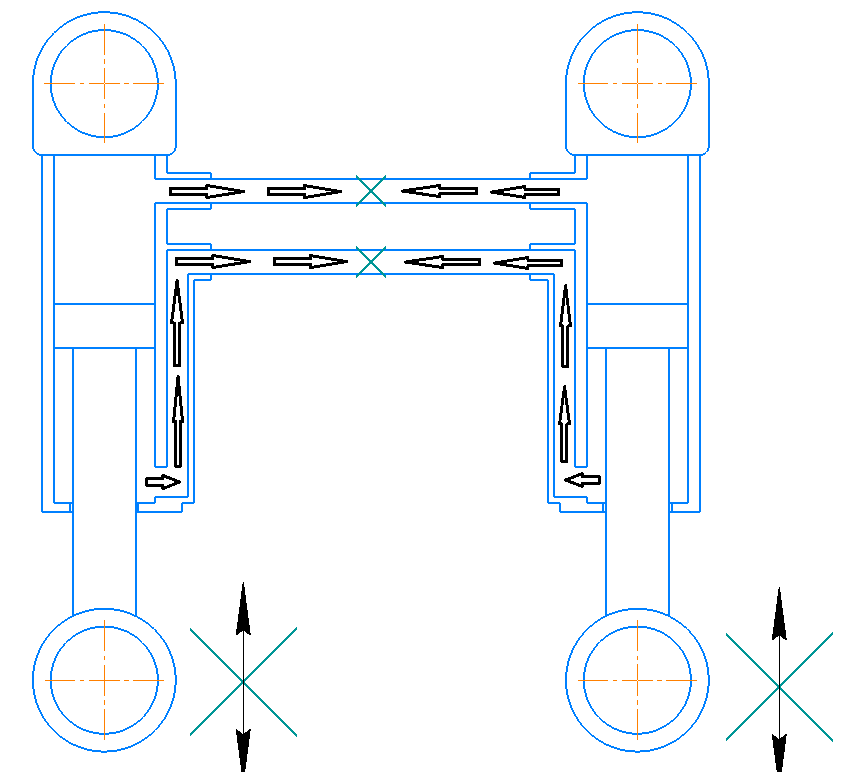
Рисунок 5 - Работа системы при движении по ровной поверхности
Таким образом, СПУ не уменьшает хода подвесок и обеспечивает лучшую плавность движения и проходимость на пересеченной местности.
Стоит отметить, что при сжатии переднего цилиндра, например, при наезде на кочку, задний цилиндр будет стремиться выдвинуться, тем самым увеличивая статический ход задней подвески. Заднее колесо будет прижиматься к поверхности. Данная особенность облегчает движение авто при диагональном вывешивании колес при отсутствии блокировок дифференциалов.
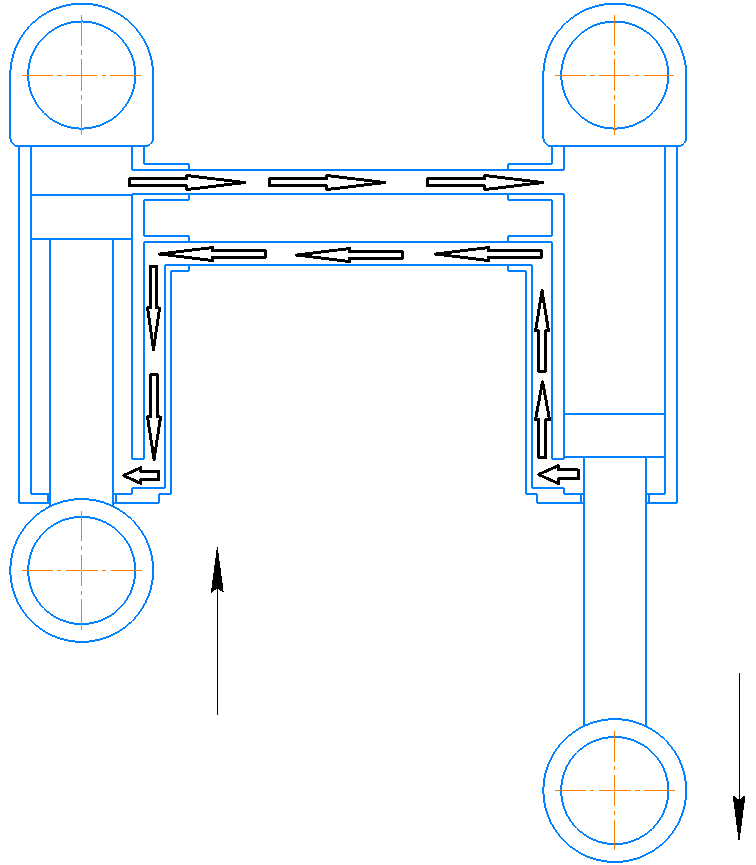
Рисунок 6 - Работа системы при движении по неровной поверхности
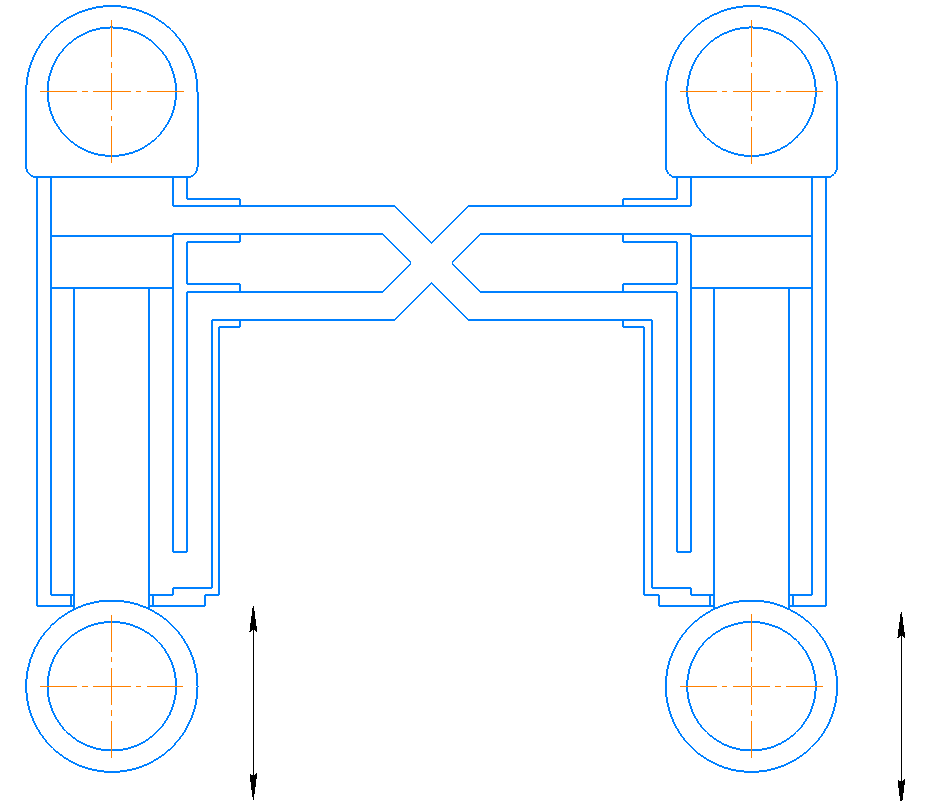
Рисунок 7 - Работа системы в разблокированном состоянии
Немаловажным достоинством системы является отсутствие в конструкции электрических и электронных управляющих систем. Активация работы стабилизатора управляется механически на основе кинематики работы подвески. Это сильно увеличивает надежность системы и ремонтопригодность системы, а отсутствие электронных систем управления упрощает её внедрение в конструкцию подвесок грузовых автомобилей.
3. Заключение
Внедрение системы управляемых гидравлических СПУ в подвеску грузовых автомобилей повышенной проходимости позволит увеличить характеристики устойчивости, безопасность, среднюю скорость при движении по дорогам с асфальтовым покрытием. При этом не влияя на проходимость автомобиля. Однако применение системы предложенной конструкции возможно только на грузовых автомобилях повышенной проходимости в двухосном исполнении, так как не решен вопрос реализации стабилизатора поперечной устойчивости для задней балансирной тележки. Наиболее подходящие базовые автомобили для внедрения предложенной системы – это автомобили с колесной формулой 4x4 и полной массой от 3 до 12 тонн. Например: Урал-43206, Камаз-4326, ГАЗ-3308. Для более тяжелых трёхосных грузовых автомобилей, таких как Урал-4320-31, Камаз-5350 будет разумно внедрить упрощённый вариант конструкции, с одним стабилизатором на передней оси.