A review of some current autonomous biomimetic underwater vehicles
A review of some current autonomous biomimetic underwater vehicles

Abstract
The work is dedicated to the review and identification of problematic issues in the design of biomimetic autonomous underwater vehicles. To achieve this objective, the relevance of the topic is noted, some principles of design of modern biomimetic autonomous underwater vehicles are given. The importance for autonomy of control issues, and energy efficiency is highlighted. Biomimetic models of fish, manta, turtles, jellyfish, octopus and crustaceans are presented. The analysis resulted in a table with the characteristics of some biomimetic autonomous underwater vehicles. The main directions of improvement of these vehicles with application of artificial intelligence for data processing and control in complex underwater environments are given as future development prospects.
1. Введение
В современном мире автономные подводные аппараты стали ключевым элементом морской инфраструктуры и находят широкое применение в различных сферах, включая исследование морской среды, обеспечение безопасности на море и выполнение различных подводных работ. Особую значимомость приобретают автономные подводные аппараты, имитирующие биологические объекты – биомиметические автономные подводные аппараты. Непростые социально-политические условия сегодняшнего дня подчеркивают значимость использования морских подводных аппаратов. Следовательно, обзор современного состояния развития как зарубежных, так и отечественных морских беспилотных подводных аппаратов является важным для анализа, оценки и определения будущих перспектив их развития, включая аспекты обороны.
В данной работе представлен краткий обзор современного состояния разработки морских биомиметических автономных подводных аппаратов. Для составления данного обзора использовались современные научные публикации, а также электронные ресурсы, посвященные разработке морских биомиметических систем. Метод обработки исходной информации включали в себя сбор, анализ, сравнение и синтез данных. В результате анализа была составлена структурированная графическая информация о характеристиках и производителях исследуемых морских систем, также в работе отмечены будущие перспективы их применения. Хочется отметить, что в данном обзоре представлены некоторые биомиметические автономные подводные аппараты, к сожалению, отчественные разработки в данной отрасли ощутимо отстают от мировых тенденций, поэтому данный обзор может помочь в понимани и оценки современных разработок. Данный обзор не претендует на всеохватывающий, в работе представлены только некоторые примеры перспективных направлений приложения данных подводных аппаратов.
2. Основные результаты
2.1. Принципы конструирования биомиметических автономных подводных аппаратов
Биомиметика, основанная на изучении и имитации биологических процессов подводных обитателей, лежит в основе создания биоподобных аппаратов, роботов. Этот подход предполагает исследование анатомии, физиологии и поведения морских обитателей, таких как рыбы, скаты, дельфины и т.д., для понимания особенностей их передвижения, манёвренности и взаимодействия с окружающей средой , .
Основные принципы биомиметической конструкции включают адаптацию формы, структуры и поверхности тела подводных существ для создания корпусов технических объектов с оптимальной гидродинамикой, а также имитацию и механизмов передвижения биологических организмов, взмах плавников, движения хвоста, для разработки эффективных систем привода и манёвренности морских автономных аппаратов. Традиционная схема движения морских робототехнических систем, основанная на использовании гребных винтов, сталкивается с рядом серьёзных проблем, включая избыточное энергопотребление, повышенное шумообразование, особенно в сложных морских условиях. Исследователи обратили внимание на технику плавания и манёвренности подводных животных, чтобы разработать инновационные биомиметические аппараты. Эти организмы используют свою физиологию и манёвренность в воде для передвижения, создавая волновые движения с помощью координации тела, грудных плавников и хвоста, и контролируют окружающий водный поток. Этот инновационный подход предлагает двигательную систему, которая не только превосходит традиционные подводные аппараты по скорости и шумоподавлению, но и отличается своей энергоэффективностью и манёвренностью , .
Характеристики существ, которые долгое время развивались в природе, во многом вдохновляют исследователей на решение инженерных проблем. Вдохновленная биологическими принципами, разработка биоповерхностей для снижения сопротивления трению в жидкости, таких как рифленая поверхность кожи акулы, самоочищающаяся и необрастающая поверхность листа лотоса, привлекла еще больше внимания за последние пару лет .
Применение технологии движения, вдохновленной биологическими организмами и основанной на механизме взмахов хвостового плавника, обеспечивает значительные преимущества, включая повышенную эффективность передвижения, улучшенную маневренность и гибкость, а также способность поддерживать стабильность положения в сложных условиях. Эти достоинства открывают широкие перспективы для разработки подводных аппаратов, обладающих высокой эффективностью и адаптивностью .
Отдельно хочется отметить скаты, которые обладают уникальной техникой плавания, используя взмахи грудными плавниками, что обеспечивает им эффективность, сравнимую с другими рыбами. Их обтекаемые формы и кожа с низким сопротивлением скольжению способствуют этим преимуществам. Уникальное движение плавников позволяет им перемещаться с меньшими затратами энергии.
Исследователи применяют методы вычислительной гидродинамики для детального численного моделирования, чтобы воспроизвести эту биологическую характеристику и понять, как батоиды достигают манёвренности благодаря взмахам грудных плавников , , .
Дельфины известны своими выдающимися плавательными способностями среди водных млекопитающих. Их эффективность плавания зависит от уникального дорсовентрального двигательного механизма, который используется другими водными млекопитающими. Исследователи стремятся понять и имитировать механизм плавания дельфинов, основываясь на дорсовентральных движениях. Они часто используют кинематические подходы для имитации движения дельфинов, считая это быстрым путём к созданию высокоэффективных подводных аппаратов.
Многие современные подводные аппараты и их дизайн основаны на исследованиях двигательных способностей дельфинов. Исследователи также подчёркивают важность взаимодействия и координации между телом дельфина и его грудными, спинными и хвостовыми плавниками для обеспечения эффективности плавания, устойчивости, ловкости и высокой двигательной силы. Таким образом, глубокое понимание и интерпретация механизма взаимодействия между телами дельфинов и их биомиметическими элементами, а также методов имитации этого механизма имеют решающее значение для совершенствования конструкции подводных аппаратов и изучения механизма плавания дельфинов .
Снижение лобового сопротивления – ключевой принцип конструирования биомиметических роботизированных систем. В процессе эксплуатации они сталкиваются с силами сопротивления, вызванными течением воды, что может замедлить их движение, повысить энергопотребление и повлиять на их устойчивость и работоспособность.
Для устранения этих проблем активно применяется биомиметическая технология снижения лобового сопротивления, имитирующая формы и механизмы подводных существ, таких как кожа акулы или согласованные движения рыб. Научно разработанные конструкции подводных аппаратов не только эффективно снижают лобовое сопротивление, но и улучшают навигационные характеристики .
Обычно инженерные решения основываются на использовании супергидрофобных материалов, хотя большинство поверхностей обладают гидрофильными свойствами. Существует множество эффективных методов создания супергидрофобных поверхностей на разных подложках, включая анодирование, электроосаждение, химическую модификацию, химическое осаждение, микротравление, высокотемпературное окисление, плазменную струю, использование наночастиц.
Пористые поверхности, пропитанные жидкостью, способны удерживать смазочную жидкость на микроструктурной поверхности, предотвращая прилипание других жидкостей. Биомиметическая плёнка также успешно создаёт супергидрофобные свойства, обладает способностью к самовосстановлению и снижает лобовое сопротивление .
Результаты экспериментального и расчетного моделирования движения рыбоподобного подводного робота представлены в статье . Трехмерная экспериментальная модель объекта была создана по бионическим формам тихоокеанского голубого тунца. Биоморфное плавание модели позволяет использовать различные параметры движения: амплитуда и частота взмахов задается управляющим сигналом сервопривода, угол огибания хвостового плавника регулируется жесткостью пружин в шарнире. Отмечается, что расчетные данные имеют хорошее совпадение с экспериментальными данными.
Целью обзора является анализ технического облика микро робототехничских комплексов. Современные отечетвенные микро робототехничские комплексы имеют недостатки и несовершенны по многим характеристикам. Часто источником вдохновения для разработки робототехники является сама природа, имитация работы нервных центров животных позволяет задать механизмы работы различных мышц на базе работы сервомоторов.
2.2. Зарядные устройства для подводных аппаратов

Модель подводного робота Bluefin-21
источник [7]

Модели подводного робота SAUV II
источник [7]
Другим вариантом подзарядки этих аппаратов является подводная платформа подзарядки, с автономной стыковкой и передачей данных для аппарата. Платформа может быть установлена на морском дне, судне на поверхности или системе швартовки с буями, приэтом навигационная система аппарата базируется на самонаведении.
2.3. Системы управления
Одним из ключевых аспектов управления автономными подводными аппаратами является технология контроля глубины. В случае стыковки двух аппаратов под водой, оба аппарата должны поддерживать постоянное положение на заданной глубине. Система управления движением подводного аппарата характеризуется следующими особенностями. Во-первых, они функционируют в сложных морских условиях с разнообразными и переменными внешними воздействиями, что обуславливает необходимость высокой надёжности. Во-вторых, модель подводного аппарата достаточно сложна, что затрудняет системы.
Наиболее распространёнными датчиками, используемыми в навигации подводных аппаратов, являются гидролокаторы, GPS и инерциальные навигационные систем. Гидролокатор применяется для мониторинга окружающей среды, предоставляя информацию о глубине воды, рельефе морского дна и наличии препятствий. Чтобы уменьшить проблему ослабления радиочастот, предложенные подводные узлы взаимодействуют с помощью акустических сигналов, чтобы обойти проблему ослабления, возникающую при использовании радиочастот , .
Система контроля глубины управляет погружением подводного аппарата, используя датчики глубины и балластные системы. Глубина погружения имеет большое значение для подводных аппаратов, так как она влияет на выполнение сложных задач в океане. Постоянный контроль глубины необходим для навигации и следования по заданному маршруту. Система контроля глубины состоит из датчиков, измеряющих глубину или давление воды вокруг аппарата, и балластной системы, которая регулирует плавучесть .
2.4. Искусственные модели рыб
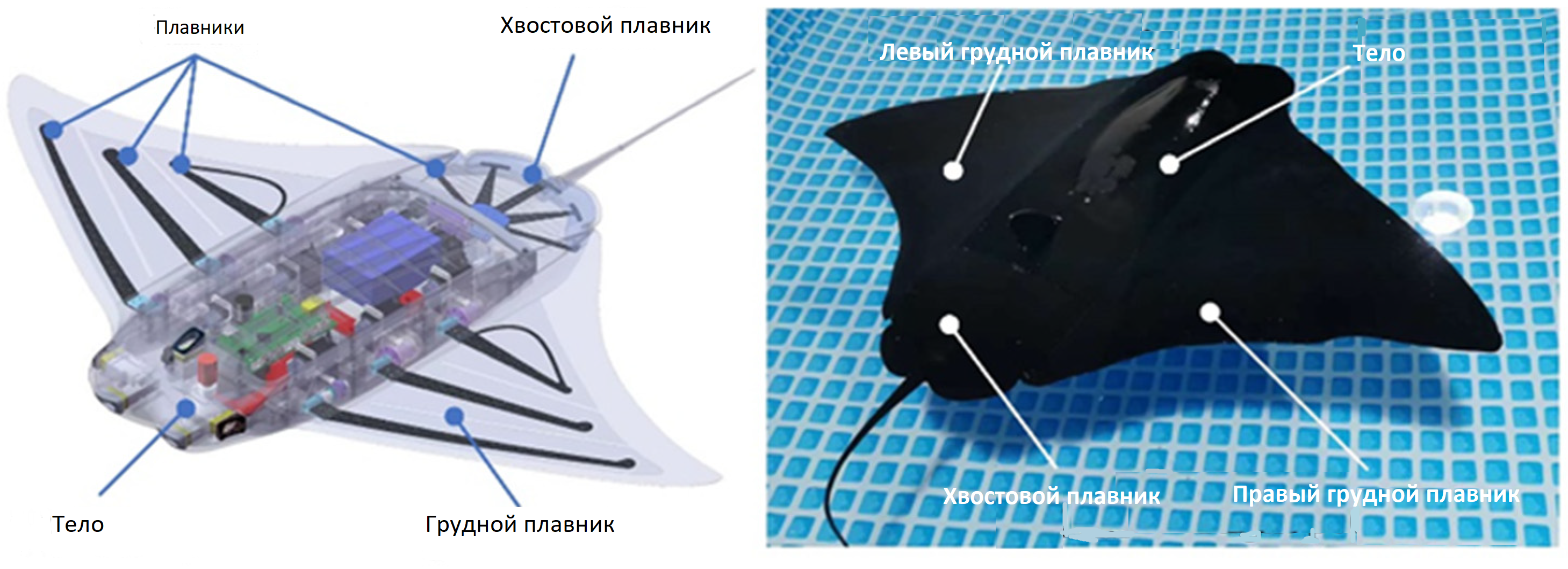
Модели, созданные на основе биологических образцов рыб, имитируют волнообразные движения их хвостов и плавников для передвижения. Эти биомиметические подводные роботы не только копируют плавание скатов-мант, но и используют сложные конструкции и передовые технологии управления. Благодаря естественному дизайну эти роботы обладают превосходной манёвренностью, что делает их незаменимыми для решения различных подводных задач, начиная с морских исследований и заканчивая подводным наблюдением, минимизируя воздействие на экосистему. На рисунке 3 изображен робот-скат Manta, разработанный для имитации плавательных движений скатов вида Манта, что позволяет эффективно и гибко исследовать подводное пространство и собирать данные .
Модель робота Manta ray
источник [9]
2.5. Искусственные модели медуз

Модель робота Jellyfish
источник [10]

Модель робота Sea turtle
источник [10]
2.7. Искусственные модели осьминогов, ракообразных
Осьминоги известны своими удивительными подводными способностями, исключительной манёвренностью и способностью манипулировать объектами с помощью своих гибких щупалец. Были созданы подводные роботы, имитирующие движения и функции осьминогов. Один из таких роботов – Octopus, разработанный Немецким аэрокосмическим центром. Робот Octopus состоит из гибкой силиконовой конструкции, способной сгибаться и адаптироваться к различным объектам, как щупальца осьминога. Захват оснащён присосками, которые могут прикрепляться к разным поверхностям, позволяя роботу захватывать предметы под водой и манипулировать ими. В работе также предложено решение для мягкой робототехники, основанное на биоинспирации осьминога .
Омары знамениты своим превосходным сенсорным восприятием и умением ориентироваться в сложных подводных условиях. Устройства, созданные по образу омаров, оборудованы сенсорами и навигационными системами, которые копируют возможности ракообразных , .
В таблице 1 представлен обзор некоторых разработок и технологий в области биомиметической автономной подводной аппаратуры. Выборочно отмечены автономные рыбоподобные подводные аппараты и робот медуза.
Таблица 1 - Некоторые современные морские биомиметические автономные аппараты
Название | Страна производитель | Год выпуска | Разработчик | Масса | Скорость | Глубина погружения | Назначение | Внешний вид |
Seaglider | США | 2008 | Irobot | 52 кг | 25 см/с | до 1000 м | Исследование флоры и фауны водоемов | рис. 6 |
BIOSwimmer | США | 2012 | Boston Engineering | 50 кг | 30 км/ч | 91,4 м | Многоцелевой спектр задач (подводный поиск, мониторинг среды и другое) | рис. 7 |
Окунь | Россия | 2016 | Группа исследователей из Юго-западного государтсвенного университета | 1,6 кг | Нет информации | до 100 м | Многоцелевой спектр задач (подводный поиск, мониторинг) | рис. 8 |
HABH jellyfish | Китай | 2022 | Группа исследователей из Сямэньского университета | Нет информации | 3,5 см/с | Нет информации | Исследование флоры и фауны водоемов | рис. 9 |
Manta Ray | Китай | 2022 | Группа исследователей из Северо-Западного политехнического университета | 10 кг | 70 см/с | до 1000 м | Исследование флоры и фауны водоемов | рис. 10 |
Seaglider

BIOSwimmer

Окунь

HABH jellyfish

Manta Ray
2.8. Перспективы развития биомиметеческих автономных подводных аппаратов
Эволюция бионических моделей автономных подводных аппаратов внесла значительный вклад в улучшение их характеристик и возможностей. Черпая вдохновение у морских животных, инженеры разработали автономные подводные аппараты, которые могут эффективно передвигаться, маневрировать и выполнять определенные задачи под водой. Эти бионические модели были усовершенствованы за счет интеграции передовых технологий, таких как искусственный интеллект, машинное обучение и компьютерное зрение, что позволяет подводным аппаратам автономно перемещаться, собирать данные и адаптироваться к меняющимся условиям .
Отметим некоторые перспективные направления развития биомиметических подводных аппаратов:
- искусственный интеллект и машинное обучение, интеграция методов искусственного интеллекта и машинного обучения при разработке подводных роботов является многообещающей, позволяя им адаптироваться к изменяющейся среде.
- расширенное зондирование окружающей среды. Будущие исследования могут быть сосредоточены на улучшении возможностей автономных подводных аппаратов по зондированию окружающей среды за счет развития сенсорных технологий и создания более надежных датчиков подводной обстановки.
- алгоритмы автономного принятия решений. Исследование и совершенствование этих алгоритмов будут иметь решающее значение. Это включает в себя разработку алгоритмов искусственного интеллекта и машинного обучения, которые позволяют подводному аппарату адаптироваться к динамичной среде, принимать решения в реальном времени и оптимизировать цели миссии.
- дальнейшие исследования по оптимизации роевой робототехники для подводных миссий могут стать многообещающим направлением. Взаимодействие между несколькими автономными аппаратам в группе, может значительно повысить их эффективность и результативность.
- энергоэффективность и системы зарядки. Основным ограничением автономных подводных аппаратов является встроенное хранилище энергии, в основном работающие от аккумулятора. Разработка более энергоэффективных двигательных установок и изучение инновационных решений зарядки могут продлить продолжительность миссии подводного аппарата.
- интеграция с новыми технологиями. Исследование интеграции подводных аппаратов с новыми технологиями, могут быть сосредоточены на повышении безопасности данных, мониторинге в реальном времени и возможностях дистанционного управления.
- достижения в области биомиметики (биомимикрии): развитие биомимикрии в конструкции автономных аппаратов может привести к созданию более эффективных и адаптируемых подводных аппаратов.
- интеграция технологии 5G. Поскольку технология 5G продолжает развиваться, изучение ее интеграции в подводные системы связи может революционизировать возможности автономных аппаратов. Высокоскоростная связь с малой задержкой может открыть новые возможности для подводной передачи данных и дистанционного управления.
В целом, перспективы технологии биомиметических автономных подводных аппаратов являются захватывающими, продолжающиеся усилия в области исследований и разработок способствуют постоянному расширению возможностей этих аппаратов, роботов.
3. Заключение
Благодаря имитации структуры, поведения и функций организмов биомиметика позволяет создавать эффективные и уникальные конструкции. Эти конструкции направлены на повышение скорости, надежности и маневренности подводных аппаратов, а также на снижение сопротивления и шума. В рамках краткого обзора была отмечена актуальность задачи, приведены основные принципы конструирования современных биомиметических автономных подводных аппаратов с учетом важности вопросов управления и энергоэффективности. Представлены биомиметические модели рыб, манты, черепах, медуз, осьминогов и ракообразных. Представлена таблица с характеристиками некоторых биомиметических автономных подводных аппаратов и отмечены также будущие перспективы развития этих устройств. Сочетание биомиметики и современых технологий конструирования дает новый подход к проектированию подводных аппаратов и открывает широкие перспективы для исследований морской среды.