Rus
Eng
Journals
Submit manuscript
Sign in / Sign up
About journal
Archive
Contacts
Advanced search
Return to article
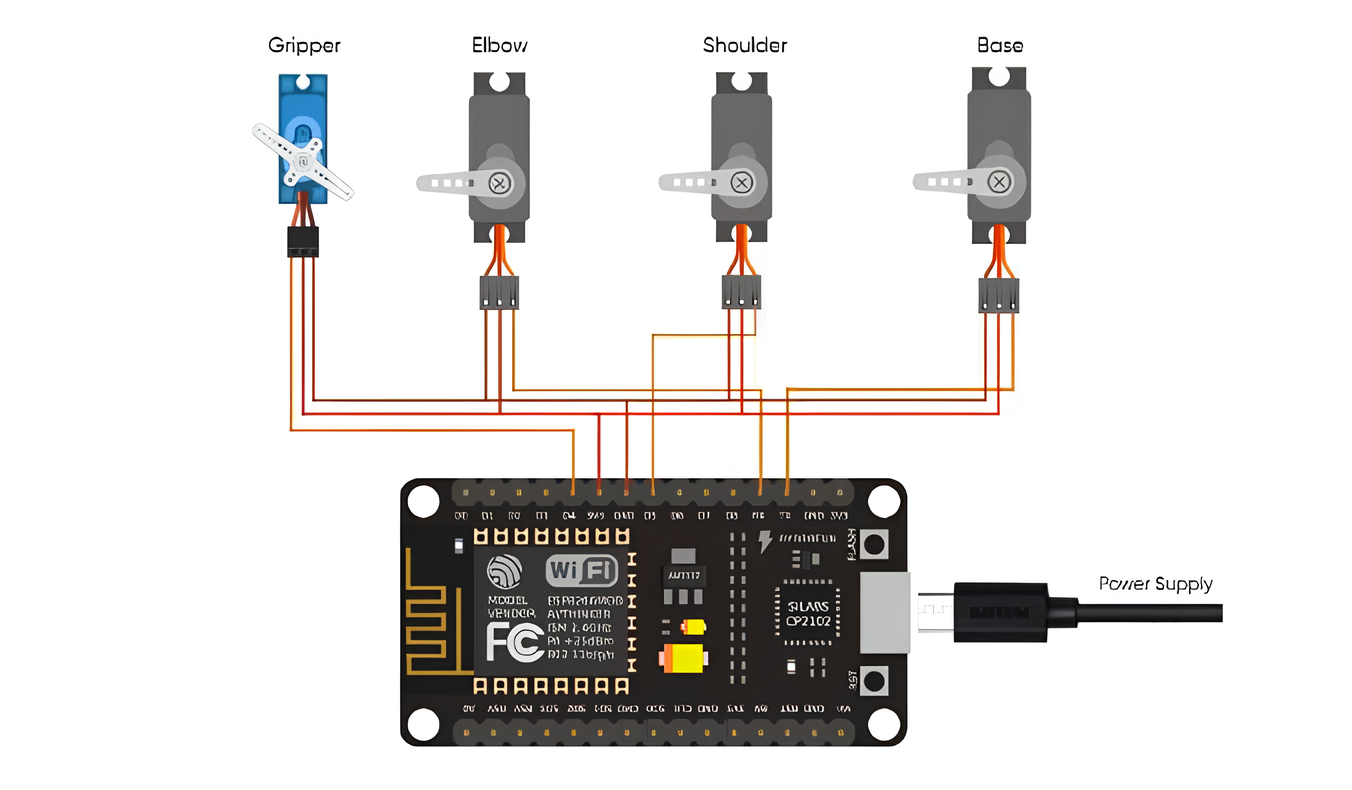
Роботизированная рука перемещения объектов для промышленного применения
Принципиальная схема системы
DOI:
10.60797/ENGIN.2025.7.1.6
Display full size
Download image