Rus
Eng
Наши журналы
Опубликовать статью
Вход и регистрация
О журнале
Архив
Контакты
Расширенный поиск
Вернуться к статье
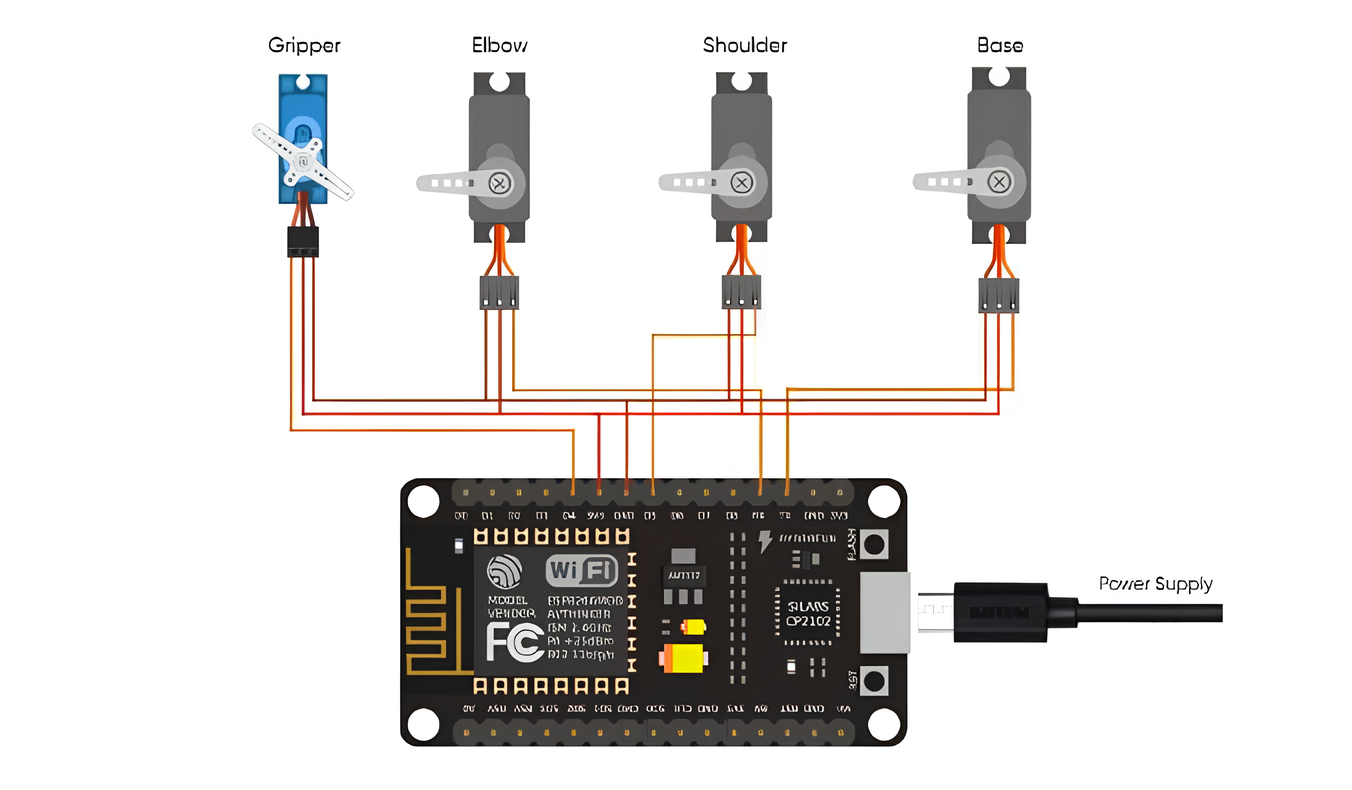
Роботизированная рука перемещения объектов для промышленного применения
Рисунок 1 - Принципиальная схема системы
DOI: 10.60797/ENGIN.2025.7.1.6