Роботизированная рука перемещения объектов для промышленного применения
Роботизированная рука перемещения объектов для промышленного применения
Аннотация
Ручной процесс перемещения вещей из одного места в другое по-прежнему остается трудоемким и неэффективным процессом в различных отраслях по всему миру. Эта статья представляет инновационное решение, использующее технологию IoT: систему роботизированной руки, предназначенную для автоматизации процессов перемещения. Управляемая удаленно через мобильное приложение и веб-интерфейс, система предлагает удобную альтернативу ручному труду, открывая новую эру внедрения IoT в промышленных условиях. Аппаратная архитектура системы обеспечивает беспроводную связь и управление двигателем, облегчая точную манипуляцию объектами во время операций погрузки и разгрузки. Роботизированная рука, являющаяся центральным элементом этого решения, управляется системой выполнения движений на основе пользовательских команд, полученных либо из мобильного приложения, либо из веб-интерфейса. Мобильное приложение предоставляет простые и интуитивно понятные средства удаленного управления роботизированной рукой, предлагая визуализацию ее движений в реальном времени с возможностью ручного управления. В дополнение к этому веб-интерфейс расширяет доступность, позволяя управлять с любого веб-устройства с доступом в Интернет. Целью этого проекта является демонстрация осуществимости и эффективности интеграции технологии IoT для автоматизации ручных задач в промышленных условиях, в частности, для оптимизации процесса перемещения вещей из одного места в другое. Снижая зависимость от ручного труда, система роботизированной руки обещает повысить эффективность, производительность и безопасность на рабочем месте в различных отраслях промышленности. Также следует отметить, что этот проект знаменует собой важный шаг в достижениях промышленных операций, демонстрируя потенциал внедрения IoT для революционного изменения традиционных процессов. Благодаря интеграции коммуникационных технологий IoT система роботизированной руки представляет собой масштабируемый и адаптируемый подход к решению трудоемких задач, знаменуя начало новой эры автоматизации в мировом промышленном секторе.
1. Введение
В современном динамичном промышленном ландшафте интеграция робототехники и технологий автоматизации служит краеугольным камнем для повышения эффективности, производительности и безопасности на производственных предприятиях. Наш проект направлен на содействие этой трансформации, предлагая индивидуальное решение, специально разработанное для задач обработки материалов в промышленности: систему роботизированной руки. Эта работа направлена на переосмысление традиционных подходов к процессу перемещения вещей из одного места в другое в промышленных условиях путем использования роботизированных технологий для оптимизации операций и сокращения человеческих усилий.
В центре проекта находится концепция проектирования и реализации усовершенствованной системы роботизированной руки, адаптированной для удовлетворения сложных требований приложений промышленной обработки материалов. С акцентом на оптимизацию эффективности и производительности наша система бесшовно интегрирует передовые робототехнические технологии с интуитивно понятными интерфейсами управления, обеспечивая точное управление и легкую работу. Автоматизируя повторяющийся и трудоемкий процесс перемещения объектов, наша система стремится уменьшить человеческие усилия, одновременно способствуя операционной эффективности и пропускной способности в промышленных условиях .
В основе нашего проекта лежат многогранные цели, охватывающие сокращение человеческих усилий, повышение эффективности работы, упрощение возможностей дистанционного управления и неизменную приверженность безопасности в промышленных операциях. Наша цель состоит в том, чтобы сократить необходимость ручного вмешательства в процесс перемещения вещей, тем самым минимизируя трудоемкие усилия и связанные с ними риски. Кроме того, наша система стремится оптимизировать логистические процессы, упрощая процесс перемещения объектов из одного места в другое, что в итоге приводит к повышению эффективности, точности и пропускной способности на промышленных объектах .
2. Существующая система
Обзор литературы охватывает разнообразные исследования, посвященные различным аспектам промышленных систем, роботизированной руки и их интеграции с современными технологиями. В статьях рассматриваются такие темы, как возможности подключения и управления по Wi-Fi, анализ производительности серводвигателя, оптимизация алгоритмов для контроля моторов и интеграция датчиков замкнутого управления. Эти исследования подчеркивают важность технологических достижений в повышении гибкости, эффективности и точности промышленных роботизированных систем, что в итоге способствует повышению производительности и безопасности в промышленных условиях.
В частности, исследования систем роботизированных рук с управлением по Wi-Fi подчеркивают преимущества возможностей удаленного мониторинга и управления, обеспечиваемых модулями Node MCU ESP8266, что повышает доступность и гибкость в промышленных операциях. Более того, анализ производительности серводвигателя освещает критерии выбора моторов, основываясь на крутящем моменте, скорости, точности и эффективности, что имеет решающее значение для оптимизации функциональности роботизированной руки. Исследования оптимизации алгоритмов и интеграции датчиков сосредоточены на улучшении алгоритмов управления и улучшении механизмов обратной связи для более плавных траекторий движения и повышения производительности в промышленных роботизированных приложениях.
Кроме того, литература по стандартам безопасности и конструкции захвата дает представление об обеспечении безопасного взаимодействия человека и робота и улучшении возможностей манипуляции роботизированных рук соответственно. Эти аспекты являются важными соображениями для проектирования и развертывания систем роботизированных рук в промышленных условиях, тесно согласуясь с целями проекта по повышению эффективности, безопасности и возможностей манипуляции. В целом, обзор литературы подчеркивает важность интеграции передовых технологий и соблюдения стандартов безопасности для повышения возможностей и универсальности промышленных систем роботизированных рук.
3. Методология
Методология описывает пошаговый процесс настройки 3D-печатной роботизированной руки и интеграции Node MCU ESP8266 с платой управления L293D. Для сборки роботизированной руки сначала необходимо обеспечить наличие 3D-принтера и подходящего материала для печати, после чего выполняется проектирование и печать компонентов с использованием программного обеспечения САПР. После обработки, такой как шлифовка или полировка для получения гладкой поверхности, выполняется сборка с использованием соответствующих крепежей. Аналогично, для интеграции Node MCU ESP8266 с платой управления моторами требуется собрать аппаратные компоненты, установить физические соединения и запрограммировать Node MCU для управления сервомоторами с помощью сигналов ШИМ. Проводится тщательное тестирование для обеспечения надлежащей функциональности настройки .
Кроме того, подробно описывается создание шаблона приложения Blynk IoT, начиная с создания проекта на веб-сайте Blynk и проектирования пользовательского интерфейса с виджетами для управления системой роботизированной руки. Далее следует настройка интерфейса и генерация токена аутентификации для безопасного соединения между приложением Blynk и Node MCU ESP8266. Шаблон проекта развертывается на облачном сервере Blynk для удаленного доступа. Наконец, настройка мобильного приложения для удаленного управления подразумевает загрузку и установку приложения Blynk, вход в систему и подключение к шаблону проекта с помощью токена аутентификации. Затем пользователи могут удаленно управлять системой роботизированной руки через интерфейс приложения, регулируя положения и скорости сервомоторов в режиме реального времени .
В целом, методология представляет собой комплексное руководство по настройке 3D-печатного роботизированного манипулятора, интеграции Node MCU ESP8266 с платой управления моторами, созданию шаблона приложения Blynk IoT и обеспечению удаленного управления через мобильное приложение, что обеспечивает системный подход к процессу реализации проекта .
4. Аппаратный аспект
1. Модуль ESP8266 WIFI:
Модуль Node-MCU ESP8266 Wi-Fi (рис. 1) выделяется ключевым компонентом в системах IoT и встраиваемых системах, предлагая мощное сочетание микроконтроллера и собственного подключения Wi-Fi. Его компактный размер скрывает мощные характеристики, включая 32-битный микроконтроллер, большое количество GPIO пинов и встроенный Wi-Fi, что делает его доступным и универсальным для разработчиков с разным уровнем навыков. Совместимость с популярными платформами программирования, такими как Arduino IDE и Lua, в сочетании с обширной поддержкой сторонних библиотек упрощает разработку и ускоряет прототипирование IoT. В частности, его доступность, простота использования и поддержка сообщества закрепили его позицию в предпочтительном выборе как для энтузиастов, так и для профессионалов IoT, демонстрируя его потенциал для стимулирования инноваций и прогресса в приложениях IoT. Благодаря компактному форм-фактору и большим возможностям, модуль Node-MCU ESP8266 продолжает расширять границы возможного в сфере подключаемых устройств и решений IoT, обещая захватывающие возможности для будущего развития и интеграции в широкий спектр проектов .
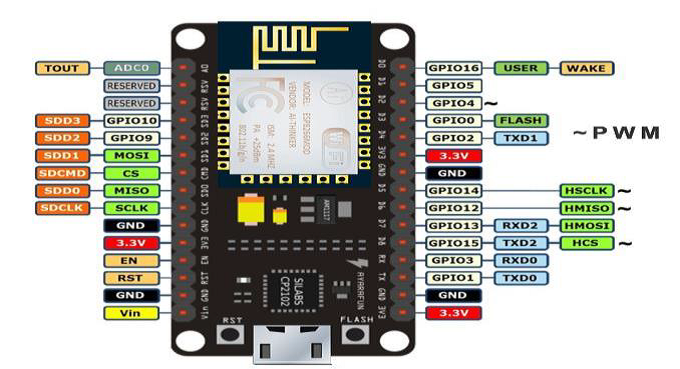
Рисунок 1 - Модуль ESP8266 WIFI
Сервомотор MG996R (рис. 2), известный своей универсальностью и точностью, работает с помощью цифровых сигналов, обеспечивая надежное управление положением и движением. С крутящим моментом около 10 кг/см и рабочим напряжением от 4,8 В до 6В постоянного тока, он обеспечивает точную работу, подходящую для различных применений, включая робототехнику и модели самолетов. Управляемый с помощью сигналов широтно-импульсной модуляции (ШИМ), он обеспечивает быструю регулировку и точные движения, повышая удобство использования в различных проектах. Изготовленный с прочными металлическими шестернями, этот серводвигатель гарантирует долговечность и устойчивость, что делает его предпочтительным выбором для решений по управлению движением. Его стандартизированные размеры облегчают интеграцию в существующие установки, а его совместимость с широким спектром микроконтроллеров обеспечивает бесшовную интеграцию. Серводвигатель MG996R, заслуживший доверие за свою надежность и постоянную производительность, остается надежным вариантом для задач управления движением в различных отраслях промышленности .

Рисунок 2 - Сервомотор MG996R
Серводвигатель SG90 (рис. 3) выделяется как популярный выбор в сфере любительских, образовательных и мелкомасштабных робототехнических проектов благодаря своему компактному размеру, доступности и удобному интерфейсу. Известное своей точностью в контроле углового положения, это легкое устройство находит применение в различных областях, таких как авиамоделирование, робототехника и аниматроника. Обладая крутящим моментом от 1,8 до 2,5 кг/см и работая со скоростью от 0,1 до 0,2 секунды на 60 градусов поворота, он обеспечивает достаточную силу и быстрый отклик для легких механизмов и приложений в реальном времени. Управляемый с помощью сигналов широтно-импульсной модуляции (ШИМ) в диапазоне напряжений от 4,8 В до 6 В постоянного тока, сервомотор SG90 обеспечивает надежную работу и совместимость с обычными источниками питания. Его компактная конструкция в сочетании с прочностью и низким потреблением тока управления обеспечивает универсальность и энергоэффективность даже в различных условиях окружающей среды. Благодаря простому интерфейсу и надежной работе сервомотор SG90 продолжает служить доступным и универсальным решением для управления движением для любителей, преподавателей и производителей, позволяя внедрять инновации и экспериментировать в области робототехники и автоматизации .

Рисунок 3 - Сервомотор SG90
Плата драйвера двигателя L293D (рис. 4) — это универсальный модуль, обычно используемый для управления двигателями постоянного тока или шаговыми двигателями в различных проектах, включая робототехнику и автоматизацию. Построенная на основе микросхемы L293D, она имеет два канала двигателя, обозначенных как «Motor A» и «Motor B», и работает на логическом уровне напряжения 5 В, совместимом с микроконтроллерами, такими как ESP8266 Node-MCU с поддержкой управления направлением и скоростью для каждого мотора, а также возможностью ШИМ для регулировки скорости, она обеспечивает гибкость в управлении двигателями. Кроме того, требуется отдельный источник питания для двигателей, обычно в диапазоне от 4,5 В до 36 В, в то время как логический рабочий ток составляет ≤60 мА. Этот модуль является важным компонентом для проектов, требующих точного управления двигателями и интеграции с микроконтроллерами, такими как ESP8266 Node-MCU, обеспечивая надежность и простоту использования в компактном форм-факторе .
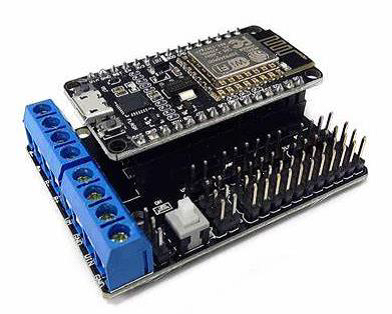
Рисунок 4 - Плата драйвера двигателя L293D для ESP8266 Wi-Fi Node-MCU Lua ESP12E
Arduino IDE (рис. 5) — это программное обеспечение с открытым исходным кодом, предназначенное для написания и загрузки кода на платы Arduino, поддерживающее такие операционные системы, как Windows, Mac OS X и Linux. Оно облегчает программирование на C и C++, с эскизами, сохраненными с расширением «. ino». Интегрированная среда разработки (IDE) обеспечивает бесшовное соединение между платами Genuine и Arduino, что необходимо для загрузки эскизов. В то же время Blynk выступает в качестве удобного для пользователя приложения Интернета вещей (IoT), позволяя легко создавать и контролировать подключенные устройства. С помощью Blynk пользователи могут разрабатывать пользовательские интерфейсы, называемые «виджетами», для удаленного мониторинга и управления различными устройствами IoT. Его интерфейс с функцией перетаскивания подходит пользователям с различным техническим опытом, поддерживая интеграцию с популярными микроконтроллерами, такими как Arduino, Raspberry Pi и ESP8266. Будь то мониторинг данных сенсоров, управление приводами или уведомления, Blynk предлагает универсальную платформу для эффективной разработки проектов IoT .
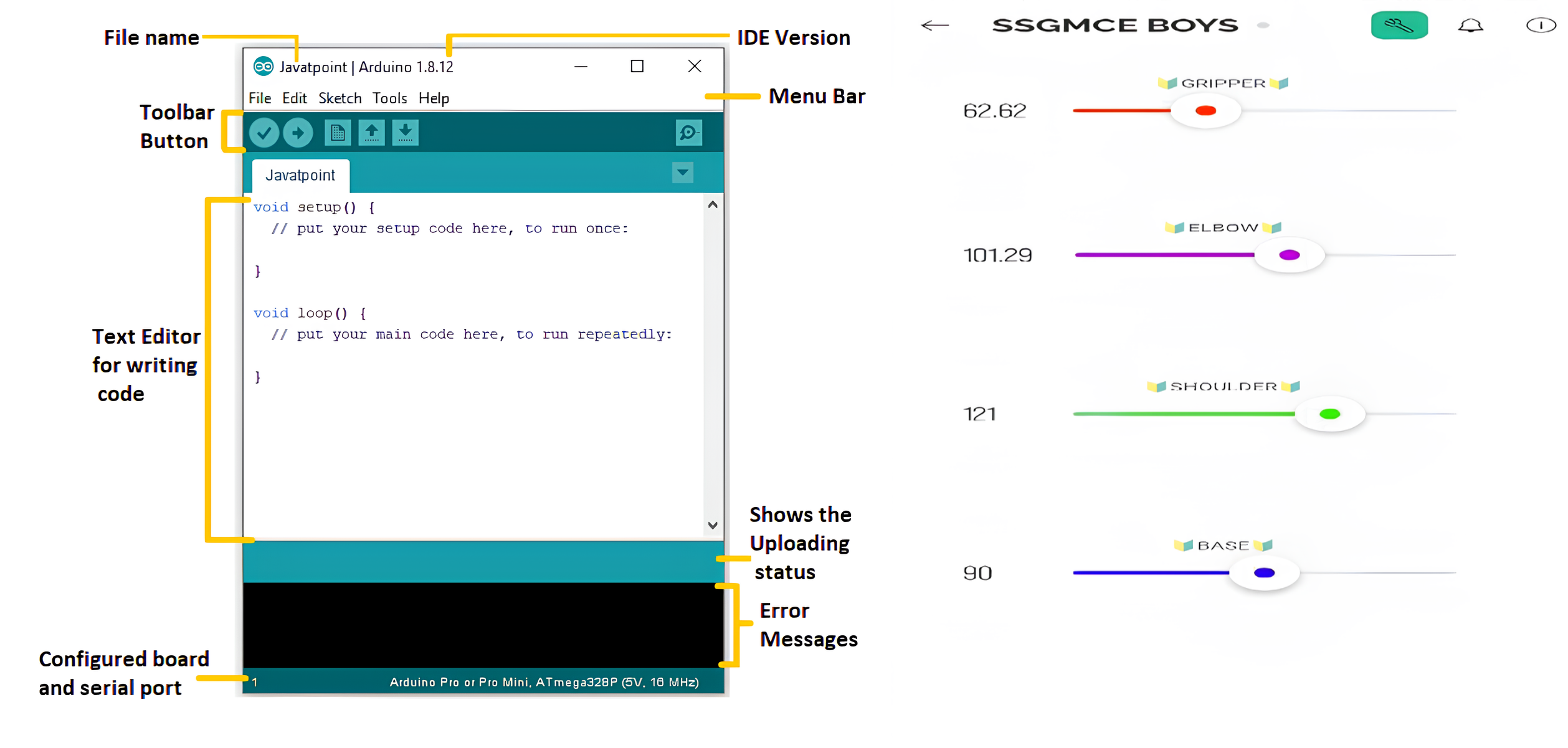
Рисунок 5 - Arduino IDE и приложение Blynk IOT
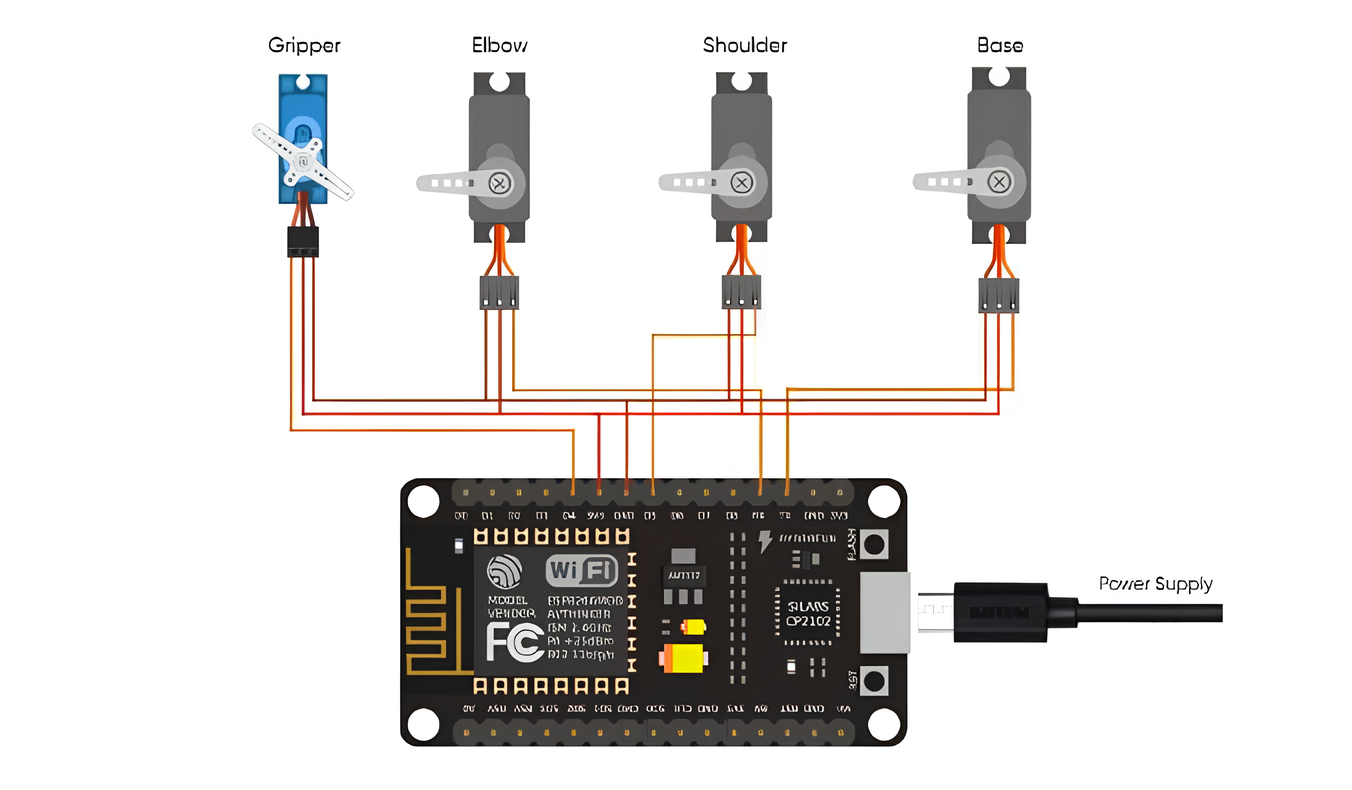
Рисунок 6 - Принципиальная схема системы
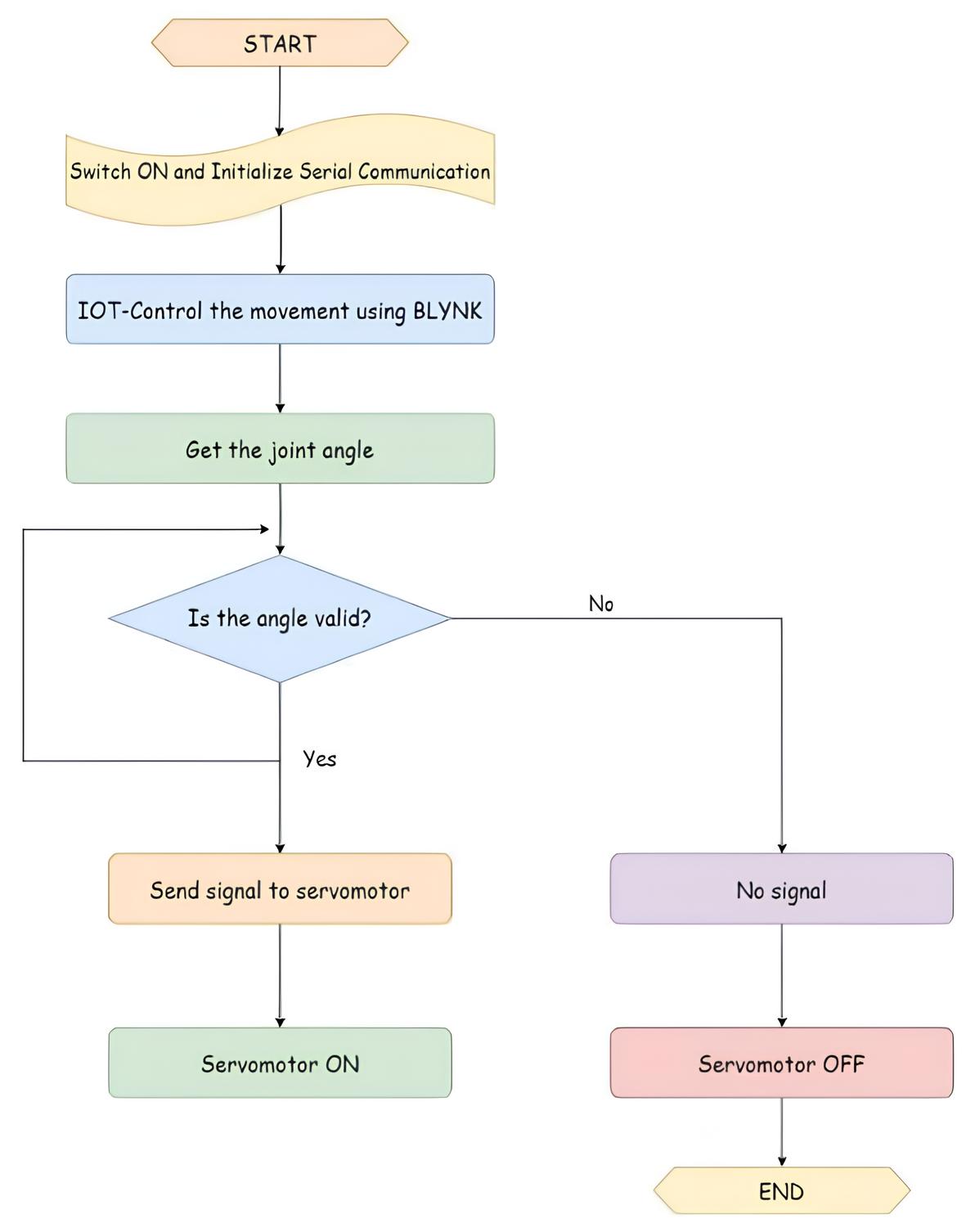
Рисунок 7 - Блок-схема работы системы
Наша реализация системы промышленной роботизированной руки, включая модуль Wi-Fi Node MCU ESP8266, сервомотор MG996R и SG90, а также плату управления двигателем L293D, оказалась успешной. Тщательное тестирование обеспечило структурную целостность и функциональность механических компонентов, что обеспечивает плавные и точные движения роботизированной руки. Интеграция Node MCU ESP8266 с платой управления двигателем обеспечила бесперебойную связь и точное управление сервомотором, в то время как приложение Blynk IoT предоставило интуитивно понятный интерфейс для удаленного управления. Наблюдения во время настройки мобильного приложения и фазы удаленного управления продемонстрировали отзывчивость элементов управления и возможности мониторинга в реальном времени, демонстрируя потенциал для улучшенной автоматизации и эффективности в промышленных приложениях.
5. Заключение
В заключение следует сказать, что разработка и внедрение системы промышленной роботизированной руки представляют собой новаторское достижение в промышленной автоматизации, эффективно решающая проблемы, связанные с перемещением объектов из одного места в другое. Используя робототехнику и технологии автоматизации, мы оптимизировали процессы, сократили человеческие усилия и повысили эффективность работы, что привело к повышению производительности и безопасности на производственных предприятиях. Заглядывая вперед, успех нашего проекта прокладывает путь для дальнейших инноваций, включая изучение расширенных функций, таких как машинное обучение для автономного принятия решений и улучшенная интеграция датчиков для восприятия окружающей среды. Более того, потенциальная интеграция с IoT и облачными вычислениями обещает создать взаимосвязанные промышленные экосистемы. Помимо производства, наша система обещает революционизировать обработку материалов в различных отраслях, повышая эффективность, гибкость и инновационность. В итоге это знаменует начало новой эры в промышленной автоматизации, где технологии робототехники и автоматизации меняют будущее производства и не только .
5.1. БУДУЩЕЕ ПРИМЕНЕНИЕ
Проект открывает возможности для расширения возможностей промышленной системы роботизированной руки. Во-первых, мы предлагаем интегрировать расширенные интерфейсы управления, такие как распознавание жестов или голосовые команды, чтобы обеспечить интуитивно понятное управление без помощи рук, повышая удобство использования в средах с ограниченной возможностью. Во-вторых, внедрение механизмов обратной связи с датчиками, такими как датчики приближения или силы, позволит отображать данные о положении руки и силах взаимодействия в реальном режиме времени, повышая точность за счет управления с обратной связью. Кроме того, изучение систем на основе визуального восприятия для автономной навигации и обнаружения объектов, наряду с интеграцией облачных сервисов, позволит осуществлять удаленный мониторинг и предиктивное обслуживание, повышая надежность. Более того, изучение совместной робототехники обеспечивает безопасность наряду с операторами-людьми, в то время как модульная конструкция обеспечивает масштабируемость для различных промышленных приложений, прокладывая путь для более адаптивной и эффективной системе роботизированной руки .