Передвижная роботизированная ремонтная станция
Передвижная роботизированная ремонтная станция
Аннотация
В статье рассмотрена разработка передвижной роботизированной ремонтной станции. Станция является вспомогательным оборудованием для транспортировки инструментов и материалов для осуществления ремонтных работ, а также является портативным источником электроэнергии для питания электроинструментов. В статье выбран источник питания станции, который способен обеспечить работоспособность всех её узлов. Рассмотрены способы управления ремонтной станции, а также применение автопилота. В статье описаны устройства, которыми оснащена ремонтная станция. Представлены функции и возможности станции в тех или иных условиях, которые облегчат работу и повысят эффективность ремонтных бригад на различных предприятиях.
1. Введение
На предприятиях имеются команды по ремонту, состоящие из разных специалистов (электриков, слесарей и т.п.). Предприятия занимают большую территории, и чтобы добраться от расположения ремонтной команды до места проведения работ, необходимо преодолеть значительное расстояние, при этом необходимо также доставить инструменты и необходимые материалы, а их суммарная масса может достигать несколько килограмм. Перенос такого веса на большие дистанции может увеличить риск получения травм. Если обслуживание или ремонт производятся на улице, то для это потребуется электрогенератор, который имеет большую массу. Для решения транспортировки инструментов и материалов, а также обеспечение рабочего места электроэнергией предлагается использование передвижной роботизированной ремонтной станции, прототип которой изображен на рисунке 1.
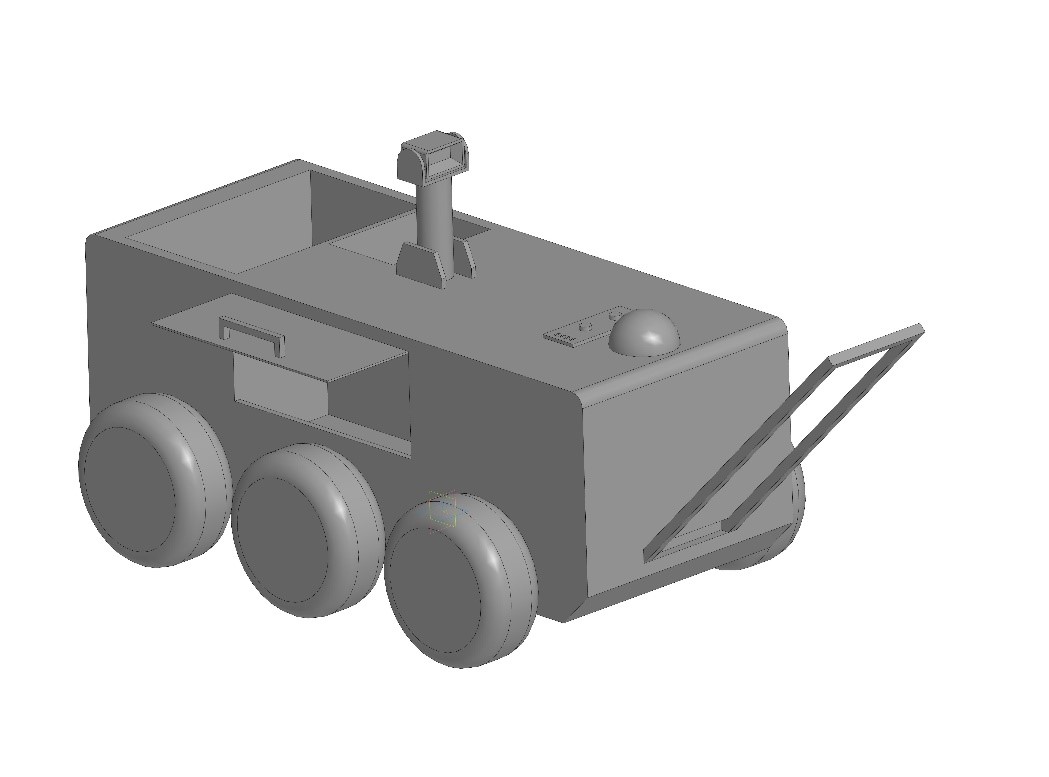
Рисунок 1 - Прототип передвижной ремонтной станции
Целью данной статьи является создание передвижной ремонтной станции с функцией следования за рабочим, что упростит его труд и обеспечит комфортные условия труда. Материалы, изложенные в статье, помогут поддержать развитие роботизированных и автопилотных (самоходных) технологий в сфере транспорта и проектировании дронов.
Актуальность темы статьи определяется тем, что в современном обществе роботизация и роботостроение являются предметом повышенного внимания учёных и молодого поколения, а также является перспективной областью исследования. Благодаря быстрому развитию технологий роботехника является востребованной и инновационной сферой промышленности. Применение этих технологий увеличит эффективность и точность работы, а также уменьшит риски для человека.
Техническим заданием для начала работы над проектом «Передвижная роботизированная ремонтная станция», является необходимость улучшить условия труда ремонтных команд и интегрировать роботизированные технологии в транспортные средства. Создать вспомогательное оборудование для ремонта, которое повысит производительность и эффективность работы, уменьшит риски для сотрудников и улучшит качество обслуживания оборудования. Разработанная станция сможет быстро и эффективно помочь в ремонте и восстановлении инфраструктуры или техники, пострадавшей в условиях бедствий или кризисных ситуаций.
2. Внешний вид станции и способы её управления
Роботизированная ремонтная станция относится к области транспортных средств, а именно к самоходным, роботизированным тележкам, и предназначена для выполнения разнообразных задач. Станция состоит из корпуса, оснащённого 6-ю колёсами, небольшим прожектором, ящиками и крепежами для размещения разного вида инструментов и инструментов в кейсах. Для подключения электроинструментов, предусмотрен встроенный удлинитель, питающийся от станции. По периметру корпуса станции, установлена светоотражающая лента, выполненная в соответствии с ГОСТ Р 50971-2011 .
Для того чтобы оператор управлял станцией, используется специальный джойстик и приложение для телефона. В приложении отображается номер станции, а также выводится информация об уровне заряда батареи в процентах и приблизительное время работы. Телефон фиксируется в специальном месте на джойстике и служит экраном для трансляции изображения с камеры, установленной на станции. Основное управление осуществляется с помощью джойстика, а перемещение пальца по экрану телефона позволяет изменять направление обзора камеры .
Сотрудник также может выполнять управление станцией. Рядом с камерой установлен микрофон, который дает возможность рабочему управлять станцией с помощью голосовых команд. Если рабочему необходимо остановиться, то используется команда «стоп», и станция остановится. Для возобновления движения, применяется команда «пуск», и станция вновь продолжит движение за рабочим. В приложении для станции предусмотрена опция для регулировки дистанции между станцией и рабочим.
3. Силовая установка и аккумулятор станции
Станция оборудована 6-ю колёсами, из которых 2 стандартные для обеспечения устойчивости и равномерного распределения нагрузки. Другие 4-е являются мотор-колёсами, отвечающими за создание крутящего момента, необходимого для перемещения ремонтной станции. Мотор-колёса обеспечивают возможность достижение и поддержку скорости в диапазоне 3 – 5 км/ч.
Конструкция мотор-колеса содержит привод вращения, размещенный на ободе колеса, а также амортизирующее устройство и привод поворота колеса, которые размещены внутри диска колеса. Такое конструкционное решение позволяет повысить проходимость ремонтной станции и улучшает поглощение колебаний подвески при проезде по неровностям. Достигается это за счёт установки в мотор-колесе два кронштейна, закрепленных на диаметрально противоположных местах внутри диска колеса. Система подвески, размещенная внутри диска, крепится к указанным кронштейнам и включает амортизатор и две пружины. Электродвигатель, обеспечивающий вращение мотор-колеса, интегрирован с системой подвески и приводом поворота колеса .
Энергоснабжение ремонтной станции обеспечивается тяговым аккумулятором, который обеспечивает необходимую мощность для её механизмов. Аккумуляторная батарея должна иметь достаточную ёмкость для поддержания ремонтной станции в рабочем состоянии в течение 8-9 часов.
Для соответствия этих требований рекомендуется использовать тяговый литий-ионный аккумулятор на 24В и 300Ач, рисунок 2. Данный аккумулятор подойдёт для ежедневного применения. В аккумулятор встроен датчик, отображающий уровень заряда в реальном времени, а также передаёт данные об аккумуляторе на телефон. Использование литий-ионного компонента в аккумуляторе, позволяет сократить время зарядки станции до 2-х часов, а также снизить время разрядки аккумулятора , .

Рисунок 2 - Тяговый литий-ионный аккумулятор 24В, 300Ач

Рисунок 3 - Литий-ионная аккумуляторная батарея 44В, 360Ач
4. Оснащение станции
Фронтальная часть станции оборудована камерой, способной вращаться на 360 градусов. В камеру встроен датчик слежения, позволяющий станции следовать за рабочим и находиться от него на заданном расстоянии. Под камерой оборудован отсек с кабелем для зарядки станции. Сверху расположена панель, на которой оборудованы кнопка включения и выключения станции, автопилота и управления оператором, а также индикатор уровня заряда аккумулятора. В нижней части установлена выдвижная ручка для транспортировки станции, в случае разряда аккумулятора.
С тыльной стороны расположены два небольших отсека для хранения инструментов, но также возможно установление выдвижных ящиков. Набор инструментов для таких ящиков может быть разнообразным, и подбирается исходя из вида выполняемых работ. Например, может быть предложен набор из 323 предметов, и включает в себя 17 ложементов (подложка для фиксации инструментов), который изображен на рисунке 4. Ложементы сделаны из материала – EVA (ЭВА, этиленвинилацетатная). Данный материал выбран, исходя из его характеристик, а именно легкости, высокой прочности, стойкостью к маслам и растворителям, а при деформации возвращает прежнюю форму. Для дополнительной защиты верхняя поверхность ложементов покрыта пластиком. В нижней части встроен удлинитель на 2 розетки и длиной провода 15 метров .
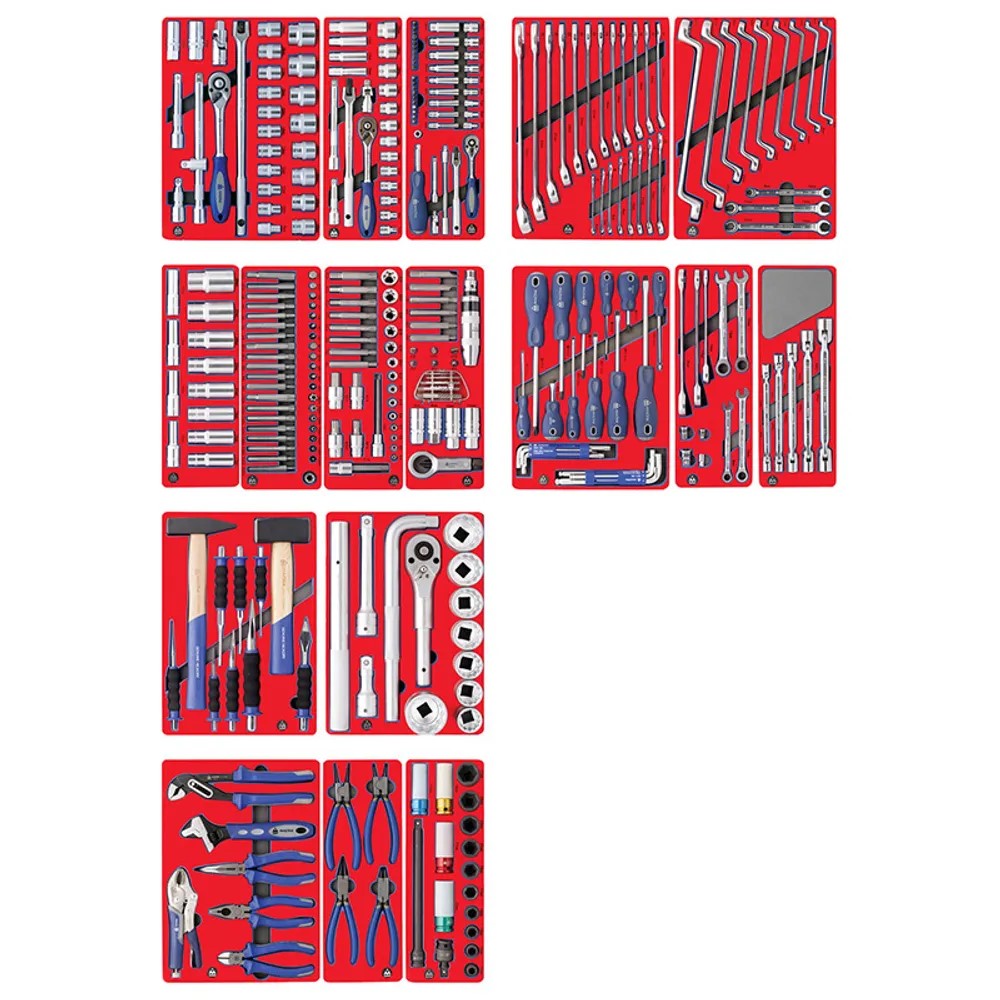
Рисунок 4 - Пример набора инструментов для выдвижных ящиков
На верхней части станции располагается небольшой прожектор. В качестве примера предлагается использовать светодиодную фару-прожектор для автомобиля на 24В и мощностью 48Вт, рисунок 5. Данный прожектор выбран из-за яркого белого света светодиодов и небольших габаритных размеров 8,5*2*8,5 (длина, ширина, высота соответственно), позволяющих разместить прожектор горизонтально на корпусе в момент транспортировки станции. При необходимости прожектор можно поднять и зафиксировать на высоте 200 мм над корпусом, что даст возможность вращать его на 360 градусов по горизонтали и от -45 до 90 градусов по вертикали. По периметру станции установлена светодиодная лента для дополнительного освещения при отсутствии необходимости в прожекторе.

Рисунок 5 - Светодиодная фара-прожектор
В качестве альтернативного можно рассмотреть электрический компрессор МАЯКАВТО AC1500ma 300 л/мин. Он также будет получать питание от станции и, несмотря на наличие двух рабочих цилиндров, отличается большей мощностью. У этого компрессора установлен аналоговый манометр без автостопа, есть защита от перегрева, но отсутствует цифровой дисплей. Длина воздушного шланга составляет 5 метров, в отличие от 3,75 метров у AUTOVIRAZH AV-010999. Если требуется более мощный компрессор, стоит выбрать МАЯКАВТО AC1500ma, в то время как для комфорта в работе лучше подойдет AUTOVIRAZH AV-010999 , .
С левой стороны за крышкой расположено техническое отделение для аккумулятора. При необходимости его можно демонтировать для ремонта, обслуживания или замены.
5. Заключение
Обобщив сказанное, можно сделать вывод, что данная передвижная роботизированная ремонтная станция станет полезным оборудованием для помощи рабочим при ремонте или обслуживании. Благодаря её оснащению и всевозможным вариантам комплектаций, станция способна выполнять множество функций и работ. Наличие управления при помощи голосовых команд, позволяет удобно и просто управлять станцией при следовании за рабочим. Возможность менять оснащение станции и устанавливать на неё разное оборудование, позволяет применять станцию не только на производствах, но и в строительстве, и во многих других отраслях. Это является хорошей перспективой развития данной идеи.